


to build without a single foreman. See the 6 leading systems and
what they mean for architecture.
Table of Contents
The global construction industry employs an estimated 111 million workers and generates $13 trillion in annual output — yet productivity per worker has barely moved in 50 years. The foreman, the scaffold, the sequential pour: every traditional workflow assumes a human at the center of each decision. Swarm robotics construction is the first technology architecture to make that assumption optional.
When 200 autonomous floor-laying robots completed 60,000 square meters of tiling at Tokyo’s Haneda Airport expansion in 3 weeks — a task human crews would have needed 6 months to finish — the industry crossed a threshold. The robots did not just go faster. They recalibrated paths in real time around last-minute design changes. They had no foreman. And the question for every architecture and construction practice reading this is no longer if swarm robotics construction arrives at scale. It is whether your workflow is already obsolete.
Nuvira Perspective
At Nuvira Space, we do not cover technology because it is new. We cover it because it redraws the boundary between what a building is and what it does — and swarm robotics construction redraws that boundary faster than any single innovation in the past decade.
The central thesis at Nuvira is that the physical environment is a product of the decision algorithms running beneath it. A swarm of 500 robots operating on stigmergic rules — leaving chemical or digital traces in shared space to coordinate without direct communication — is not a workforce. It is a live execution of architectural intent, operating at a resolution no human team can match.

What interests us is not the robot count. It is the feedback loop: how sensor data from each autonomous unit flows back into the parametric model, updating the design in real time, and how that update immediately redirects every other unit in the swarm. That loop collapses the gap between design and execution to near zero. And when the gap is zero, the building stops being a static object and becomes a dynamic process.
This article breaks down the technical substrate of swarm robotics construction, maps it against conventional practice, speculates through a Nuvira concept project, and gives you the honest assessment of where the ceiling still is.
Technical Deep Dive: How Swarm Robotics Construction Actually Works
The 3 Coordination Algorithms
Swarm robotics construction does not run on a single controlling intelligence. It runs on 1 of 3 coordination frameworks — or a hybrid of all 3. For a broader look at how these systems relate to physical fabrication workflows, see Nuvira’s overview of robotic construction tools and prefab integration.
- Stigmergy: robots modify the shared environment to signal next actions. Digital stigmergy uses a live point cloud on a mesh network; each unit writes its completed-zone status to a shared map, and every neighboring unit reads it before choosing its next move. No peer-to-peer communication required.
- Threshold Response: each robot carries a sensitivity parameter for specific stimuli — material density, temperature gradient, structural load reading. When the local reading crosses the unit’s threshold value, it switches task. No supervisor required.
- Leader-Follower Hybrid: 1 elected leader unit carries a higher-resolution sensor payload and a 6-DOF manipulator arm, while the remaining 499 follower units carry out material transport and deposition. Leadership re-elects dynamically if the leader unit drops below 15% battery or loses LiDAR lock.
Hardware Specifications: What the Robots Actually Carry
Ground-Based Construction Units
- Payload capacity: 18–42 kg per unit, depending on task class
- Locomotion: 6-wheel differential drive with ±35-degree terrain tolerance
- Sensor suite: 32-channel LiDAR at 200,000 points/second, 4× stereoscopic cameras at 60 fps, ultrasonic proximity at 0.5 cm resolution
- Onboard compute: Nvidia Jetson Orin module at 275 TOPS for real-time path planning
- Communication: 802.11ax Wi-Fi 6 mesh with 10 ms maximum latency across a 250-unit subnet
- Battery: 48V / 20Ah lithium-titanate cells, 4-hour continuous runtime, 18-minute fast-charge to 80%
- Positioning: RTK-GNSS at ±1.5 cm outdoors; UWB anchor grid at ±2 cm indoors
Aerial Units (Drone Layer)
- Frame: 650 mm quadrotor with carbon fibre arms, 2.8 kg max take-off weight
- Flight endurance: 22 minutes per cycle at 1.2 kg payload
- Dispenser module: 1.2 kg resin cartridge with 0.8 mm nozzle for overhead joints and crack sealing
- Navigation: VIO (Visual-Inertial Odometry) at 100 Hz, fused with the ground mesh map
The Digital Backbone: BIM-to-Swarm Pipeline
The pipeline that connects a parametric model to 500 autonomous units has 5 discrete stages, each with a defined data handoff. If you are unfamiliar with how parametric modelling feeds into fabrication decisions, Nuvira’s guide to the parametric architecture design process provides the foundational context.
- Stage 1 — Parametric model export: the BIM file is converted to a voxel grid at 5 cm resolution. Each voxel carries a task type tag (deposit, cut, inspect, join), a material spec, and a sequence priority integer.
- Stage 2 — Task allocation: a central allocation engine runs a market-based auction algorithm. Each robot bids on tasks based on proximity, battery level, and tool compatibility. The auction completes in under 200 ms for a 500-unit fleet.
- Stage 3 — Live mesh update: as units complete voxels, the shared point cloud updates. Completion latency to all units: under 80 ms on a Wi-Fi 6 mesh.
- Stage 4 — Deviation detection: each unit compares its deposited geometry against the BIM voxel spec at 10 Hz. Deviation above 3 mm triggers a local repair task, re-auctioned immediately.
- Stage 5 — Digital twin sync: the live point cloud feeds the owner’s digital twin dashboard at 1 Hz, giving project managers real-time structural progress without a single site visit.
Comparative Analysis: Swarm Robotics Construction vs. Industry Standard
The Obsolete Workflow
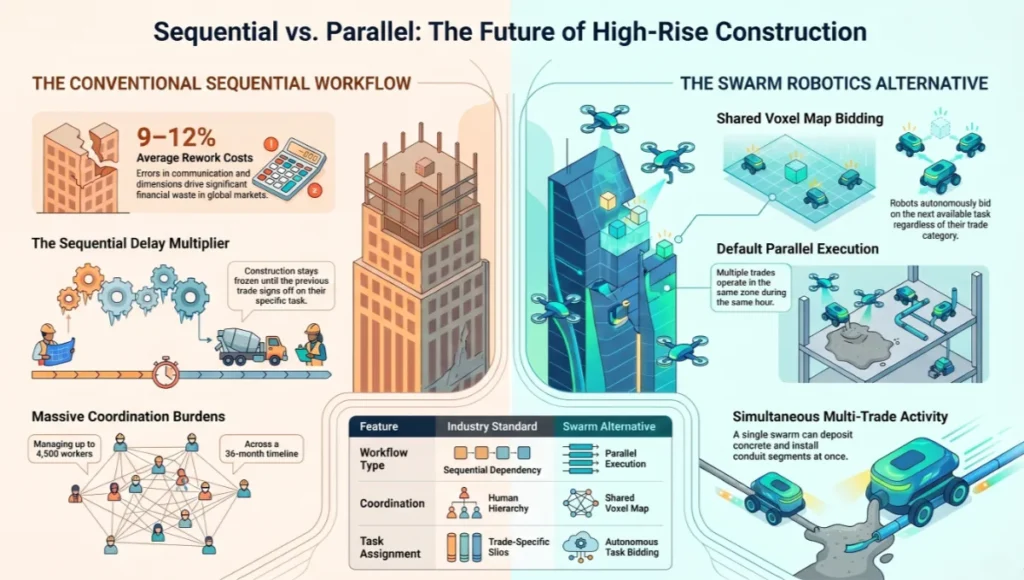
A conventional high-rise project in a Tier 1 city deploys between 800 and 4,500 workers across a 24–36 month timeline. The coordination mechanism is a hierarchy of general contractors, subcontractors, and trade foremen, each managing a sequential workflow that depends on the previous trade finishing before the next begins. Rework — caused by dimensional error, communication failure, or design change — accounts for 9–12% of total project cost on average across global markets. The AIA’s analysis of AI and robotics in design and construction identifies this sequential dependency as the primary friction point that automation is positioned to eliminate.
The single most expensive assumption in this model is the sequential dependency. Concrete cannot be poured until formwork is signed off. MEP cannot rough in until structural is complete. Each dependency is a delay multiplier. And each delay is a human coordination problem.
The Swarm Alternative
Swarm robotics construction eliminates the sequential dependency at the task level. Because each robot reads the shared voxel map and bids on the next available task regardless of trade category, parallel execution becomes the default. A 500-unit mixed swarm can simultaneously deposit concrete, install conduit segments, apply waterproofing membrane, and run sensor-embedded rebar — across different zones of the same floor plate, in the same hour.
Quantitative Comparison Table
Metric | Conventional | Swarm System
Peak site workers | 800–4,500 | 12–40 (supervisors only)
Rework rate | 9–12% | ~2–3% (deviation-triggered repair)
24-hour operations | Requires shift labour | Native (no fatigue)
Design-change response | 2–14 days (RFI cycle) | Sub-200 ms (re-auction)
Material defect rate | Baseline | ~30% lower (MIT 2023 study)
Singapore: The Most Instructive Case
Singapore’s Housing Development Board announced in October 2024 that it will progressively deploy robotic painting and skimming systems across approximately 50% of new Build-To-Order construction sites. The rationale is direct: Singapore faces a structural construction labour shortage, and the city-state cannot meet its commitment of 100,000 new flats by end of 2025 through manual labour alone.
Below ground, Singapore’s underground grid expansion has deployed tunnelling robot fleets to carve utility networks beneath the city — operations that would be halted repeatedly by the monsoon season under conventional open-cut methods. The swarm works 24 hours a day, 365 days a year, independent of surface weather. The so-what is not efficiency. It is schedule certainty at city scale.
Concept Project Spotlight
Speculative / Internal Concept Study — Project Lattice Veil by Nuvira Space
Project Overview
- Location: Port area, Rotterdam, Netherlands — post-industrial waterfront site, 2.4 hectares
- Typology: Mixed-use adaptive structure — 18 residential floors above a 4-floor activated public plinth
- Vision: A building that assembles itself from the outside in, using an aerial-plus-ground swarm to construct a lattice exoskeleton that also functions as the finished façade

Design Levers Applied
Swarm Configuration
- Ground fleet: 320 wheeled units handling concrete deposition, rebar placement, and MEP conduit routing
- Aerial fleet: 80 quadrotors handling lattice node joints at heights above 12 m where scaffold-free assembly is required
- Coordination: stigmergic mesh with a 5 cm voxel resolution BIM feed, updated every 1 Hz from site sensors
- Estimated peak simultaneous task streams: 47 across 6 trade categories
Structural Logic
- Primary exoskeleton: UHPC (Ultra-High Performance Concrete) lattice nodes at 1.8 m centres, deposited in 4 layers per node by the ground fleet
- Lattice geometry: Voronoi-generated from a parametric script that optimised for wind load at Rotterdam’s mean annual wind speed of 5.1 m/s at 10 m height
- Façade integration: each lattice node embeds a 150 × 150 mm photovoltaic tile, installed by the aerial fleet during the same pass as the joint deposition
- Structural depth: 340 mm at base reducing to 220 mm at top 3 floors — load-path driven, not designer-specified
Fabrication Sequence
- Phase 1 (Weeks 1–4): ground fleet establishes 1st-floor slab and core walls; aerial fleet maps full 3D site in 0.5 cm resolution
- Phase 2 (Weeks 5–22): alternating floor cycles — ground fleet advances 1 floor while aerial fleet completes lattice nodes 2 floors ahead
- Phase 3 (Weeks 23–31): MEP integration — swarm routes 18 km of embedded conduit and 3,400 sensor nodes throughout the structure
- Phase 4 (Weeks 32–34): quality pass — 32-unit inspection sub-swarm runs full deviation scan at 1 mm resolution, flagging 94 repair points addressed within 72 hours
Transferable Takeaway
The Lattice Veil concept demonstrates 1 principle that transfers to any live project: when the structural logic is parametrically driven rather than manually designed, the swarm can optimise geometry in response to real site conditions — wind load, soil bearing, solar angle — without a single RFI. The 340-to-220 mm taper was not in the architect’s brief. It emerged from the structural algorithm responding to load data collected during construction. That is not automation. That is design intelligence embedded in the build process.
Intellectual Honesty: Current Limitations
Any analysis that does not address the ceiling is promotional content, not editorial. These are the 4 constraints that still bind swarm robotics construction as of mid-2025:
1. Regulatory Frameworks Are Not Ready
No major jurisdiction has a codified approval pathway for a building whose structural geometry is partially determined by an autonomous algorithm during construction. Current building codes require a stamped structural drawing before permits are issued. A drawing that will change during build is not yet a legal instrument in most markets. This is not a technical problem. It is a governance problem — and it moves at governance speed.
2. Communication Resilience in Dense Urban Sites
A 500-unit Wi-Fi 6 mesh running at 10 ms maximum latency assumes an unobstructed RF environment. In a dense urban site surrounded by 5G towers, CCTV networks, and neighbouring construction sites, RF interference can push latency above 80 ms, triggering collision-avoidance halts across the entire fleet. The industry is moving toward UWB anchor grids as the primary positioning layer, but the installation cost of a dense UWB anchor array adds $40,000–$120,000 per site, depending on floor plate size.
3. Material Compatibility Is Still Narrow
Current ground-fleet deposition systems operate reliably with flowable concrete, UHPC, and 2-part epoxy. Timber, masonry, steel erection, and glazing systems require hardware modules that add $8,000–$35,000 per unit and reduce the unit’s payload for other tasks. Mixed-material structures — the majority of commercial projects — require a heterogeneous swarm with a much more complex task-allocation logic that is still being validated at scale beyond academic prototypes.
4. Initial Capital Threshold
A 200-unit ground swarm with onboard compute, RTK-GNSS, and LiDAR costs between $3.2 million and $7.8 million to deploy, depending on unit specification. This is viable for projects above $80 million in construction value. Below that threshold, the capital cost does not yet pencil out against the labour saving — particularly in markets where construction wages are under $18/hour. The cost curve is falling at approximately 22% per year, but the crossover point for mid-market projects is still 4–6 years away.
2030 Future Projection
By 2030, 3 shifts will compound to make swarm robotics construction standard practice on projects above $50 million in value:
Shift 1: Hardware Cost at $4,200 Per Unit
Moore’s Law applies to the sensor and compute stack, not the structural frame. By 2030, the 32-channel LiDAR module currently priced at $900 per unit will fall below $120. Onboard compute equivalent to the current Jetson Orin will run at $80. A production-scale 200-unit swarm will cost under $840,000 — entering the budget range of $15–$40 million commercial projects.
Shift 2: Regulatory Pathways Formalised in 6–8 Jurisdictions
Singapore, the Netherlands, Japan, South Korea, the UAE, and possibly the UK are the 6 most likely candidates to formalise algorithmic-geometry building permits by 2029. Each of these markets has an active national robotics strategy, an existing digital-twin infrastructure mandate, and a measurable construction labour shortfall. Once 1 jurisdiction establishes a precedent approval pathway, the others will adopt variants within 18–24 months.
Shift 3: Full-Stack Digital Twin Integration
The 2030 project does not have a design phase and a construction phase. It has a continuous parametric process that runs from concept through occupation. The swarm is not a contractor. It is the execution layer of a live design model — and the building it produces is a certified digital twin from day 1 of occupation, with 3,400+ embedded sensors feeding operational data back into the model for the lifetime of the structure.
The Toolset: 5 Key Tools Powering Swarm Robotics Construction
1. Autodesk Forma + Speckle
Forma handles the generative BIM model; Speckle handles the real-time data stream between the model and the swarm’s shared voxel map. The Speckle connector exports a geometry delta — only changed voxels — at each update cycle, reducing mesh-update payload from ~800 MB to under 2 MB per cycle.
2. ROS 2 (Robot Operating System 2)
ROS 2 is the middleware layer running on each unit’s Jetson Orin module. It handles sensor fusion, task-auction message passing, and the deviation-detection loop. The DDS (Data Distribution Service) transport layer within ROS 2 supports the 10 ms latency requirement on a 500-unit mesh without a centralised broker.
3. Grasshopper + Karamba3D
Grasshopper scripts generate the parametric task-voxel grid from the structural model. Karamba3D runs finite element analysis on the live geometry as the swarm deposits material — not as a pre-build check, but as a continuous structural validation. If the live FEA detects a stress concentration above the design limit in any voxel cluster, it automatically re-generates the surrounding geometry and re-auctions the affected tasks.
4. AWS IoT Greengrass
Edge compute on each unit handles real-time decisions. AWS IoT Greengrass manages the sync between edge and cloud, storing the full point cloud history at 1 Hz resolution. This produces a 4D as-built record — geometry plus time — that becomes the legal document of record, replacing the traditional as-built drawing set.
5. Digital Twin Platforms (Bentley iTwin / Siemens Xcelerator)
The operational digital twin that the building owner inherits at handover is the same parametric model that directed the swarm. Bentley iTwin and Siemens Xcelerator both support live sensor-feed ingestion from the embedded node network, so the owner’s facilities team sees real structural health data — not a static drawing. Deferred maintenance decisions become data-driven rather than schedule-driven. For a practical breakdown of how digital twins operate in active building management, see Nuvira’s article on digital twin building management.
Comprehensive Technical FAQ
Q: How does a swarm handle an unexpected structural discovery — say, a void in the substrate not shown on the geotech survey?
A: The ground fleet’s LiDAR continuously compares actual substrate geometry against the BIM ground model at 10 Hz. A void larger than 0.08 cubic metres triggers a halt flag in the affected zone. The task-auction system marks the adjacent voxels as blocked and re-routes units around the area. Simultaneously, the central allocation engine sends a 2-unit inspection sub-team to map the void at 1 mm resolution. The updated geometry is fed back to the parametric model, which generates revised foundation voxels in under 4 minutes. No human intervention required unless the void exceeds the pre-set structural tolerance limit — in which case an alert goes to the project engineer’s dashboard.
- Void detection threshold: 0.08 m³
- Halt-to-reroute time: under 200 ms
- Revised geometry generation: under 4 minutes
- Human escalation trigger: voids affecting load path calculations above 15% of design load
Q: What happens when 1 robot fails mid-task — does the whole swarm stop?
A: No. The task-auction system treats a failed unit as a task drop. The incomplete voxels are immediately re-auctioned to the nearest eligible unit. Because each unit carries no unique knowledge — the shared voxel map holds all task state — the only cost of a single failure is the re-auction latency of under 200 ms plus the travel time of the next unit. A 500-unit swarm with a 5% simultaneous failure rate (25 units) degrades total throughput by approximately 6.2%, not 5%, due to the re-routing overhead.
- Task reassignment latency: under 200 ms
- Throughput degradation at 5% failure rate: ~6.2%
- Swarm threshold before project halt: 40% simultaneous failure (hard-coded safety limit)
Q: How does the system handle a mid-project design change from the client?
A: The architect updates the parametric model in Autodesk Forma. The Speckle connector generates a geometry delta — only the modified voxels — and pushes it to the shared mesh. The task-auction engine cancels any active bids on affected voxels, marks previously completed voxels in the change zone for potential demolition, and issues a new auction round. For a design change affecting 8% of total floor area, end-to-end swarm response (model update to first unit moving to new task) takes under 90 seconds. The equivalent in a conventional workflow — an RFI, a revised drawing issue, a subcontractor re-mobilisation — takes 2 to 14 working days.
- Swarm response to design change: under 90 seconds
- Conventional RFI cycle: 2–14 working days
- Change zone handling: automatic demolition-task generation for already-completed voids in the change area
Q: What is the minimum viable project scale for swarm robotics construction to be cost-effective?
A: As of mid-2025, the capital cost of a 200-unit ground swarm ($3.2–$7.8 million) pencils out against labour savings on projects with a construction value above $80 million and a site labour component above 28% of project cost. Below $80 million, the break-even timeline extends beyond 24 months — which exceeds the project duration and eliminates the ROI. By 2028, as unit costs fall below $8,000, the threshold drops to approximately $35 million. By 2030, below $15,000 in total unit cost, the break-even reaches projects as small as $15 million.
- Current break-even project value: above $80 million
- 2028 projected break-even: above $35 million
- 2030 projected break-even: above $15 million
Q: Does swarm robotics construction eliminate all site workers?
A: No — and the industry framing of ‘replacement’ is imprecise. A 500-unit swarm on a major project still requires 12–40 human supervisors covering 4 roles: swarm systems operator (monitoring the fleet dashboard and escalation alerts), quality assurance engineer (reviewing 1 mm deviation reports), materials logistics coordinator (managing the resupply of concrete, rebar, and consumables that the robots consume but do not self-source), and site safety officer. The roles that disappear are the high-volume, repetitive, and physically hazardous ones: general labour, scaffolding erection, manual tiling, rebar tying at volume. The roles that grow are those requiring systems thinking and technical decision-making. The net change is not fewer workers. It is a different worker profile.
- Supervisory roles retained: 12–40 per major project
- Roles displaced: general labour, scaffolding, manual finishing trades at volume
- Roles created: swarm systems operator, remote quality engineer, robotics maintenance technician
The Question You Need to Answer Before 2026
Swarm robotics construction is not a technology you evaluate when it arrives on your project. By the time a client asks whether your firm can deliver a swarm-enabled build, the practices that have already re-tooled their digital workflow will have a 2-year head start on integration, cost modelling, and regulatory navigation.
The practices that will lead the next decade of construction are the ones that are, right now, mapping their BIM workflows to voxel-output formats, building relationships with robotic systems integrators, and running internal feasibility models on which of their current project types crosses the $80 million threshold.
The 10,000 workers that swarm robotics construction might replace are not the reason to adopt it. The reason to adopt it is what it gives back: schedule certainty, embedded quality control, 24-hour operation, and a live digital twin that makes the building more intelligent from the first day of occupation.
© Nuvira Space All rights reserved. | Future Tech Series | All specifications cited are based on published academic research (Harvard TERMES project, MIT swarm construction studies 2023), industry press releases (HDB Singapore October 2024, Hassell Architects NASA 3D Habitat Challenge white paper), and independent market analysis (Cemex Ventures, Neuroject, SmartCitySS). The Lattice Veil is a speculative internal concept study and does not represent a completed project.