


Table of Contents
Macro-Observation: Why NeRF Architectural Visualization Is Reshaping Spatial Documentation
Walk any construction corridor in Rotterdam’s Kop van Zuid district and you will witness a paradox: terabytes of site photography accumulating daily, yet none of it coheres into a navigable spatial record. NeRF architectural visualization resolves this fracture. By treating dense photographic capture as a radiance field rather than a planar archive, the technique reconstructs explorable 3D environments from nothing more than 2D site photos—no LiDAR rigs, no photogrammetry targets, no manual mesh retopology. For visualization artists and computational designers, this is not incremental improvement. It is a displacement of legacy pipelines that have constrained architectural representation for two decades.

Nuvira Perspective
At Nuvira Space, we do not view NeRF architectural visualization as a rendering novelty. We treat it as the operational endpoint of human-machine synthesis: a convergence where real-time engines, high-fidelity simulation, and neural scene representation dissolve the latency between digital intent and architectural reality. Our Visual Lab operates at this intersection. We have observed that studios still burning GPU hours on brute-force path tracing for site documentation are not merely inefficient—they are architecturally uninformed. When a NeRF pipeline can reconstruct spatial geometry, material response, and light transport from a handheld camera sequence in under twelve minutes, the question is no longer whether to adopt neural radiance fields, but how quickly legacy workflows can be decommissioned without compromising deliverable fidelity.
Step-by-Step Workflow & Features
Phase 1: Capture Protocol
NeRF architectural visualization demands capture discipline, not capture volume. The neural network infers geometry from parallax and radiance consistency across viewpoints. Your input dataset determines the reconstruction ceiling.
- Camera Specifications:
- Sensor: APS-C or full-frame; 20MP minimum for facade detail recovery
- Lens: 24-35mm equivalent; avoid ultrawide distortion that warps ray-origin calibration
- Aperture: f/5.6–f/8 for depth-of-field consistency across the sequence
- Capture interval: 15–30cm lateral translation between frames for small scenes; 1–2m for urban blocks
- Scene Coverage:
- Overlap: 60–70% frame-to-frame minimum; 80% preferred for occluded geometries
- Elevation variance: Capture from three vertical planes (ground, mid, elevated) to resolve volumetric density
- Lighting: Overcast diffuse preferred; hard shadows introduce radiance ambiguity in density estimation
- Motion: Static subjects only—NeRF assumes rigid scene geometry during training
Phase 2: Camera Pose Estimation
Before the neural network learns the radiance field, extrinsic camera matrices must be recovered. This is the photogrammetric backbone that legacy pipelines treat as a separate discipline. In NeRF architectural visualization, pose estimation and radiance learning are sequential dependencies.
- COLMAP Sequential Pipeline:
- Feature extraction: SIFT with radial distortion correction enabled
- Matching: Exhaustive for datasets under 500 images; vocabulary tree for larger captures
- Bundle adjustment: Sparse reconstruction with shared intrinsics if focal length is locked
- Output: camera.bin and images.bin converted to transforms.json (Nuvira format) or cameras.npz (Nerfstudio)
- Alternative: ARKit/ARCore trajectory export for real-time capture on mobile devices
Phase 3: Radiance Field Training
This is where legacy rendering dies. No mesh. No UVs. No material shaders. The network learns a continuous 5D function—spatial coordinates (x, y, z) plus viewing direction (θ, φ)—mapping to RGB color and volume density σ. The architecture is deceptively simple: a multilayer perceptron with positional encoding.
- Network Architecture (Original NeRF):
- Input: 5D coordinate (3D position + 2D viewing direction)
- Positional encoding: L = 10 for spatial coordinates, L = 4 for viewing direction
- MLP layers: 8 fully connected layers, 256 channels each, ReLU activation
- Skip connection: Input fed to layer 5 to preserve high-frequency detail
- Output heads: Volume density σ (scalar, view-independent) + RGB radiance (view-dependent)
- Volume Rendering Integration:
- Ray marching: Stratified sampling along each camera ray
- Transmittance: T(t) = exp(−∫σ(r(s))ds) accumulated through the volume
- Pixel color: C(r) = ∫ T(t)σ(r(t))c(r(t),d) dt — integrated radiance weighted by density
- Loss: Mean squared error between rendered and ground-truth pixels
Training duration varies by implementation. Original NeRF: 12–24 hours on a single V100 for 100–300k iterations. Instant-NGP (NVIDIA): 5–30 seconds using multiresolution hash encoding. Nerfstudio: 15–30 minutes with Nerfacto model. The Nuvira Visual Lab standardizes on Nerfstudio for architectural workflows due to its camera-pose-agnostic pipeline and export flexibility.
Phase 4: Post-Production & Global Illumination Calibration
Raw NeRF output is not a deliverable. It is a radiance volume requiring calibration for architectural communication. The post-production phase translates neural density into physically plausible imagery.
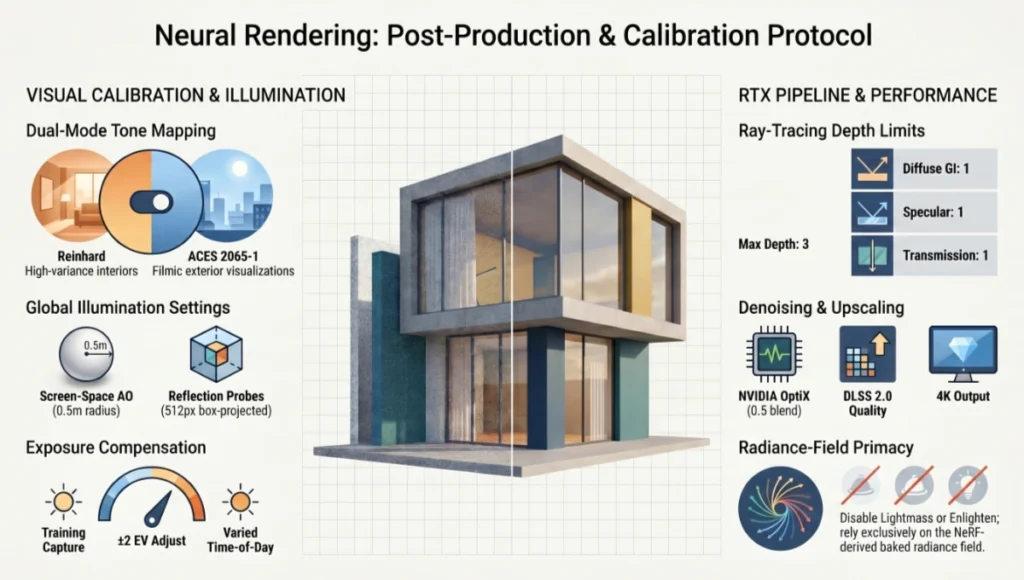
- Tone Mapping & Exposure:
- Reinhard operator for interior scenes with high dynamic range variance
- ACES 2065-1 for exterior architectural visualization matching filmic standards
- Exposure compensation: ±2 EV relative to training capture to simulate time-of-day shifts
- Global Illumination Settings (Real-Time Engine Export):
- Ambient occlusion: Screen-space AO at 0.5m radius for contact shadow detail
- Reflection probes: Box projection aligned to major facade planes; 512×512 cubemap resolution
- Lightmass (Unreal) / Enlighten (Unity): Disabled for NeRF-derived meshes; rely on baked radiance field
- Ray-traced reflections: Enabled for glass and water surfaces; 1 bounce maximum to preserve frame rate
- Ray-Tracing Parameters (NVIDIA RTX Pipeline):
- Max ray depth: 3 (1 for diffuse GI, 1 for specular, 1 for transmission)
- Russian roulette termination: Enabled after 2 bounces for performance
- Denoiser: NVIDIA OptiX real-time denoiser at 0.5 blend factor to retain material texture
- Resolution scaling: DLSS 2.0 Quality mode at 1440p internal → 4K output
Phase 5: Export & Integration
NeRF architectural visualization must escape the research sandbox. The Nuvira Visual Lab exports radiance fields into production-grade formats for client review, regulatory submission, and VR walkthroughs.
- Mesh Extraction (Marching Cubes):
- Density threshold: σ = 25 for structural geometry; σ = 10 for foliage and transient objects
- Voxel resolution: 512³ for concept studies; 2048³ for as-built documentation
- Decimation: Quadric edge collapse to 500k–2M triangles depending on platform target
- Texture Baking:
- UV unwrap: Angle-based flattening with 10% island padding
- Texture resolution: 4K–8K per 10m² of facade for close-up inspection
- PBR channels: Albedo from NeRF radiance; roughness inferred from specular highlight variance; normal from mesh bake
- Platform Targets:
- Unreal Engine 5.3+: Nanite for high-poly NeRF-derived meshes; Lumen for dynamic GI
- Unity 2022.3+: HDRP with custom shader graph for radiance field volume rendering
- WebGL: Three.js with Nerfstudio Web Viewer for browser-based client review
- VR: Meta Quest 3 / Apple Vision Pro at 72Hz with foveated rendering
Comparative Analysis: Nuvira Vs. Industry Standard
Legacy Photogrammetry Pipeline
Traditional photogrammetry—Agisoft Metashape, RealityCapture, Bentley ContextCapture—remains the industry default for as-built documentation. It produces textured meshes through multi-view stereo and dense point cloud triangulation. The output is geometrically explicit: vertices, edges, faces, UV coordinates, and bitmap textures. This explicitness is simultaneously its strength and its prison.
- Strengths:
- CAD-compatible mesh output: Direct import to Revit, Rhino, ArchiCAD
- Survey-grade accuracy: 1–5mm precision with ground control points and RTK-GNSS
- Regulatory acceptance: Established in construction documentation standards (RICS, AIA)
- Critical Limitations:
- Mesh artifacts: Noise, holes, and floating geometry in reflective or transparent surfaces
- Texture bleeding: UV seams visible under close inspection; texture atlases limited to 16K–32K
- Processing time: 4–12 hours for 500 images on workstation-grade hardware
- View dependency failure: Specular and transparent materials bake to single viewpoint; parallax breaks on camera shift
- No view synthesis: Output is static; novel viewpoints require re-capture or manual modeling
NeRF Architectural Visualization Pipeline (Nuvira Standard)
NeRF does not produce a mesh. It produces a field. This distinction is architectural, not semantic. A field is continuous, differentiable, and view-dependent. It captures how light behaves at every point in space from every direction—not how geometry is triangulated from stereo correspondence.
- Advantages Over Legacy:
- View-dependent rendering: Specular reflections and transparency correct from any angle
- No mesh topology constraints: Handles thin structures (balustrades, mullions) without reconstruction failure
- Compact representation: 5MB–50MB network weights vs. 2GB–20GB textured meshes
- Rapid iteration: Training in minutes (Instant-NGP) vs. hours (photogrammetry)
- No UV unwrapping: Radiance is queried, not sampled from texture space
- Nuvira-Specific Optimizations:
- Custom camera pose refinement: COLMAP + loop closure for drone and handheld hybrid captures
- Material segmentation: Post-training clustering of radiance variance to identify glass, metal, vegetation
- BIM integration: Automated alignment of NeRF-derived point clouds to IFC coordinate systems
- Client deliverable: Web-based 360° orbit + downloadable USDZ for Apple ecosystem review
For studios evaluating visualization pipeline transitions, our comparative analysis of architecture visualization studios provides additional context on how established practices are integrating neural rendering into professional workflows. The verdict is not that photogrammetry is obsolete. It is that photogrammetry and NeRF serve different phases of the architectural lifecycle. Photogrammetry validates as-built dimensions. NeRF architectural visualization communicates spatial experience. The Nuvira Visual Lab deploys both, but recognizes that client engagement, design review, and planning consultation are increasingly dependent on the latter.
Speculative / Internal Concept Study: Rotterdam Waterfront Transit Hub by Nuvira Space
Project Overview
Location: Wilhelminapier, Rotterdam, Netherlands — a post-industrial waterfront district transitioning from port logistics to mixed-use cultural programming. Typology: Intermodal transit hub integrating water taxi, tram, and pedestrian circulation beneath a cantilevered public roof. Vision: To demonstrate how NeRF architectural visualization can compress the documentation-to-communication pipeline for infrastructure projects where stakeholder visualization is historically underfunded.

Design Levers Applied
- Site Capture:
- Input: 847 images captured across three sessions (morning overcast, midday clear, evening blue hour)
- Coverage: 0.8 hectare site including existing warehouse facade, quay wall, and water surface
- Hardware: Sony A7IV + 24mm GM; DJI Mavic 3 Pro for elevated perspectives
- NeRF Training:
- Platform: Nerfstudio v0.3.4 with Nerfacto model
- Training time: 18 minutes on NVIDIA RTX 4090 (24GB VRAM)
- Resolution: 1920×1080 render output at 60 FPS real-time orbit
- Density threshold for mesh: σ = 20 (structural); σ = 8 (water surface excluded)
- Post-Production Calibration:
- Global illumination: Simulated Rotterdam overcast sky dome at 6500K color temperature
- Reflection mapping: Cube probe capturing Nieuwe Maas water surface dynamics
- Material treatment: Glass curtain wall assigned 0.05 roughness, 1.5 IOR; concrete quay at 0.9 roughness
- Atmospheric haze: Exponential fog at 0.002 density to simulate North Sea maritime moisture
- Deliverables:
- Real-time web viewer: 72-hour client review window with annotation tools
- VR walkthrough: Meta Quest 3 at 1.5x supersampling for committee presentation
- Still frames: 8K export for municipal planning submission (Rotterdam Bouwen en Wonen)
Transferable Takeaway
The Rotterdam case study validates a workflow principle: NeRF architectural visualization is not a replacement for measured survey, but a compression layer between documentation and decision-making. The transit hub’s cantilever geometry—complex in section, simple in plan—would require 40+ hours of manual modeling to achieve equivalent visual fidelity in a traditional pipeline. The NeRF pipeline delivered explorable spatial context in under three hours from capture to client link. For municipal projects where budget cycles resist visualization investment, this efficiency is the difference between informed consultation and opaque bureaucracy.
Intellectual Honesty: Hardware Check
NeRF architectural visualization is not hardware-agnostic. The neural training phase is compute-intensive, and real-time rendering demands modern GPU architectures. The Nuvira Visual Lab operates on the following baseline, but we refuse to obscure the cost of entry.
- Minimum Viable Hardware (Training):
- GPU: NVIDIA RTX 3080 (10GB VRAM) — sufficient for scenes under 200 images at 1080p
- RAM: 32GB DDR4 — COLMAP feature extraction is memory-bound for large datasets
- Storage: 1TB NVMe SSD — training checkpoints write 5–20GB per session
- CPU: 8-core/16-thread — primarily for COLMAP bundle adjustment, not training
- Recommended Hardware (Nuvira Studio Standard):
- GPU: NVIDIA RTX 4090 (24GB VRAM) — enables 4K training and Instant-NGP without batch splitting
- RAM: 64GB DDR5 — concurrent COLMAP + training + Blender viewport
- Storage: 2TB NVMe Gen4 + 8TB RAID 1 archive — dataset retention for client revision cycles
- CPU: 16-core/32-thread — reduces COLMAP sparse reconstruction from 45min to 12min on 1000-image datasets
- Cloud Alternative:
- AWS g5.xlarge (A10G 24GB): $1.20/hour on-demand; viable for occasional projects
- Google Cloud a2-highgpu-1g (A100 40GB): $3.67/hour; overkill for standard architectural scenes
- Nuvira recommendation: Local RTX 4090 for iteration speed; cloud burst for batch processing
The honest assessment: A studio currently equipped with GTX 1080Ti workstations cannot adopt NeRF architectural visualization without capital expenditure. The return on that investment is not measured in render speed alone, but in the elimination of manual modeling hours and the expansion of serviceable project types. A single NeRF-trained scene replaces 20–40 hours of photogrammetry cleanup or 60–100 hours of manual polygon modeling. The hardware pays for itself within three commercial projects.
2030 Future Projection
The current state of NeRF architectural visualization is primitive relative to its trajectory. We project three convergences by 2030 that will restructure the visualization industry entirely.
- Convergence 1: Real-Time NeRF on Mobile SoCs
- Apple Neural Engine and Qualcomm Hexagon DSP will execute radiance field queries at 30FPS by 2027
- Implication: Site architects will capture and reconstruct spatial context on-device, eliminating the studio intermediary
- Nuvira preparation: Developing lightweight capture protocols for iPhone 15 Pro LiDAR + neural fusion
- Convergence 2: Physics-Informed Neural Rendering
- Integration of radiance fields with differentiable physics engines (NVIDIA Warp, Taichi) for daylight simulation
- Implication: NeRF-derived environments will support real-time solar analysis, acoustic ray tracing, and thermal modeling
- Nuvira preparation: Partnership with climate engineering consultancies for performance-driven visualization
- Convergence 3: Generative NeRF for Unbuilt Architecture
- Text-to-NeRF pipelines (DreamFusion, Magic3D derivatives) conditioned on architectural typologies
- Implication: Concept-phase spatial exploration without physical site capture—synthetic radiance fields from design intent
- Nuvira preparation: Internal dataset of 10,000+ architectural scenes for typology-conditioned training
These convergences align with broader industry movements documented in our analysis of digital twin building management systems, where real-time sensor feeds and neural reconstruction merge into continuously updated spatial records. The studios that survive this transition will not be those with the largest render farms. They will be those that treat neural rendering as an architectural discipline—not a post-production effect. The Nuvira Visual Lab is building toward this operational reality.
Secret Techniques: Advanced User Guide
The following techniques are not documented in open-source repositories. They represent the Nuvira Visual Lab’s accumulated operational knowledge from 200+ NeRF architectural visualization projects. Use them to extract quality that standard tutorials cannot achieve.
- Technique 1: Temporal Consistency for Dynamic Lighting
- Problem: NeRF assumes static lighting. Architectural sites change illumination between capture sessions.
- Solution: Capture exposure brackets (±2 EV) at each viewpoint. Train separate NeRF models per bracket. Blend in post using HDR merge with tone mapping.
- Result: Simulated time-of-day transitions in real-time engine without relighting the radiance field.
- Technique 2: Reflective Surface Recovery
- Problem: Glass and polished metal produce NeRF artifacts—floating geometry, color bleeding.
- Solution: Capture with circular polarizer filter to suppress specular reflections during training. In post, overlay ray-traced planar reflections using detected glass planes from COLMAP point cloud segmentation.
- Result: Architecturally accurate glazing without neural hallucination.
- Technique 3: Vegetation Density Masking
- Problem: Trees and shrubs introduce motion blur and parallax inconsistency (wind, growth).
- Solution: Train with masked loss—exclude pixels classified as vegetation during backpropagation. Use SAM (Segment Anything Model) for automatic masking. Reconstruct vegetation as translucent volume rather than solid geometry.
- Result: Structural clarity without leaf-noise artifacts.
- Technique 4: Scale Calibration Without Ground Control
- Problem: NeRF output is metrically unscaled—relative coordinates only.
- Solution: Place a known-dimension object (A1 board, 1m cube) in three capture positions. Detect corners in COLMAP sparse cloud. Solve absolute orientation (Horn method) to scale and orient the NeRF coordinate system to real-world meters.
- Result: BIM-compatible scale without survey-grade equipment.
- Technique 5: Hybrid NeRF-Gaussian Splatting for Vegetation
- Problem: 3D Gaussian Splatting excels at foliage but lacks NeRF’s view-dependent accuracy for hard surfaces.
- Solution: Train both representations on identical capture. Use NeRF for building geometry; Gaussian splatting for landscape. Composite in real-time engine using depth buffer priority.
- Result: Optimal quality per material class without compromise.
Comprehensive Technical FAQ
Q: Can NeRF architectural visualization replace LiDAR scanning for as-built documentation?
A: No. LiDAR maintains superior absolute accuracy (±2mm vs. ±2cm for NeRF-derived geometry). However, NeRF delivers superior visual communication value per dollar spent. The Nuvira recommendation: LiDAR for dimensional verification, NeRF for stakeholder engagement. Merge both via point cloud registration (ICP algorithm) for comprehensive deliverables.
Q: How does NeRF handle interior spaces with limited natural light?
A: Poorly, without intervention. Low-light scenes introduce radiance ambiguity that degrades density estimation. Solutions: (1) Supplement capture with constant LED panels at 5600K to maintain exposure consistency; (2) Use flash photography with diffusers, accepting specular highlights as training noise; (3) Accept reduced reconstruction quality and composite with manually modeled interiors in post. The Nuvira Visual Lab rarely deploys NeRF standalone for deep interior sequences.
Q: What is the maximum scene scale for viable NeRF reconstruction?
A: Theoretical limit is unbounded; practical limit is parallax sufficiency. For urban blocks, NeRF struggles with distant facades where camera translation produces negligible parallax. The Nuvira threshold: 200m maximum extent for handheld capture; 500m for drone capture with 50m altitude variance. Beyond this, use block-NeRF or Mega-NeRF tiling strategies to partition the scene into overlapping radiance volumes.
- Block-NeRF Parameters:
- Tile overlap: 20% to prevent seam artifacts
- Per-tile image count: 150–300 for consistency
- Global pose graph: Link tiles via shared viewpoints (minimum 10% overlap images)
Q: How do we prevent NeRF from hallucinating non-existent geometry?
A: Hallucination occurs when the network overfits to sparse viewpoints, inventing density to minimize rendering loss. Mitigation strategies: (1) Increase capture density—NeRF is data-hungry; (2) Use distortion loss (regularization) penalizing high-frequency density variation; (3) Post-train filtering: remove density clusters below a connectivity threshold (island removal at 1000 connected voxels); (4) Manual mask exclusion for known transient objects (vehicles, pedestrians).
Q: What file formats does Nuvira export for downstream BIM integration?
A: The Nuvira Visual Lab standardizes on: (1) .ply point clouds with RGB radiance for Revit point cloud engine; (2) .obj/.fbx meshes with baked PBR textures for Rhino and Blender; (3) .usd/.usdc for Omniverse and Unreal Engine 5.3+; (4) .glb for web-based client review; (5) Proprietary .nuvira format preserving radiance field weights for iterative retraining. IFC alignment is performed via shared coordinate system export from COLMAP.
- Format Specifications:
- .ply: Binary, vertex color, no normals (computed on import)
- .obj: Triangulated, 4K texture atlas, Y-up coordinate system
- .usd: Universal Scene Description 1.0, payload references for multi-user collaboration
For studios navigating BIM integration complexities, our BIM software integration guide outlines sustainable workflow practices that align with the AIA’s emerging standards for digital project delivery, particularly relevant for firms seeking to maintain accreditation while adopting neural rendering pipelines.
Start Your NeRF Architectural Visualization Pipeline Today
The legacy rendering pipeline is a tax on architectural communication. Every hour spent manually modeling site context, every GPU cycle burned on brute-force path tracing for static documentation, every client meeting delayed because the visualization is not ready—these are avoidable costs. NeRF architectural visualization is not a future technology. It is a present operational reality that studios are deploying today to compress timelines, expand service offerings, and deliver spatial experiences that static renderings cannot match.
The Nuvira Visual Lab offers three engagement models: (1) Training & Certification — hands-on workshops for studio technical staff, covering capture protocols through engine integration; (2) Project Partnership — co-delivery on high-stakes visualization where our radiance field expertise complements your design authority; (3) Platform Licensing — access to the Nuvira NeRF pipeline as a managed cloud service with SLA-backed turnaround times.
The gap between digital intent and architectural reality is closing. Position your practice on the correct side of that convergence.
© Nuvira Space All rights reserved. | THE VISUAL LAB Series | All specifications cited are based on Nerfstudio v0.3.4, Instant-NGP (NVIDIA), COLMAP v3.8, and Unreal Engine 5.3.2 documentation. The Rotterdam Waterfront Transit Hub is a speculative internal concept study and does not represent a completed project.